バケツロボ復活の巻・2
前回から早10ヶ月、やっぱりというか予想通り放置してたわけですが、
ようやくまたやる気になったので、バケツロボ引っ張り出してきました。
あとは残すところたしかディテールアップと塗装だったよね・・・。

じつは最近、新しいガンプラみてたせいか
すっかり可動が気になるようになってしまいました、
(ガンプラ素晴らしいもんね)
「こいつ・・動かないぞ・・」
足なんて頑張ってこのくらい。

腕は二重関節なのにほとんど曲がらない、
ボールジョイントだけど・・・それにしてもね。

てなわけで、腕を普通にポリキャップの軸関節になおしてみました、
外見も、もう片方の手と違和感ないような形に変更。
これで関節は一つだけど90度くらい曲がるようになりました。
さて次は足ですけど・・・、
・・・ふとアッガイたんみたいに足を前に投げ出したみたいに
座らせてみたい〜! なーんてこと考えてしまいました。

そのためには胴体と干渉しないように、股関節の位置下げないといけないので、
まず太もも短くします、薄いレーザー鋸でギコギコ切りました。
↑左が切ったところ。

途中すっ飛ばしてますけど作り直した足。
切り取った太ももに股関節を作り直し、
股関節のふんどし長く作り直し、
膝の二重関節化、
足首のボールジョイントが旧式だったので交換、
結局ほとんど作り直してるじゃないか・・。

足組んだところ、
胴体への設置方法は変わらないけど、支柱が長くなりました。

ヒザ関節。
一応曲がるけど、正座って言うにはちょっと不自然、
ここ詰めると伸ばしたときスキマ無くなるし、
セッティングの詰めがイマイチ、
ただ、ここまで曲げることはポーズ的にあんまりないから、
今回は放置(そのうちなんとかなるだろう・・・)

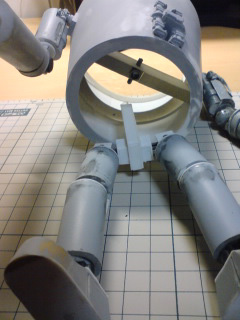
こんな感じで股関節を胴体の下に出しました、
これで足が前に曲がります♪

ついに狙い通り座れました〜、
ミクロマンマテリアルフォースとのツーショット。
(イメージ/ 背景 お花畑)

おててつないで、るんたらら〜♪